


















S3F84B8_ALL-IN-ONE IH COOKER_AN_REV 0.00 2 HARDWARE IMPLEMENTATION
2-10
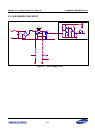
2.4.2 CURRENT MEASUREMENT
R4 1K
OPA_O
R13 36K
RW1
10K
OPA_N
C10
104J
SYS_I
+
C12
1uF/16V
CURRENT
R14 100K
R15
22K
S3F84B8
R
f
R
1
OPA
_
N
OP
A
_
P
OP
A
_
O
Gain
=
-
R
f
/
R1
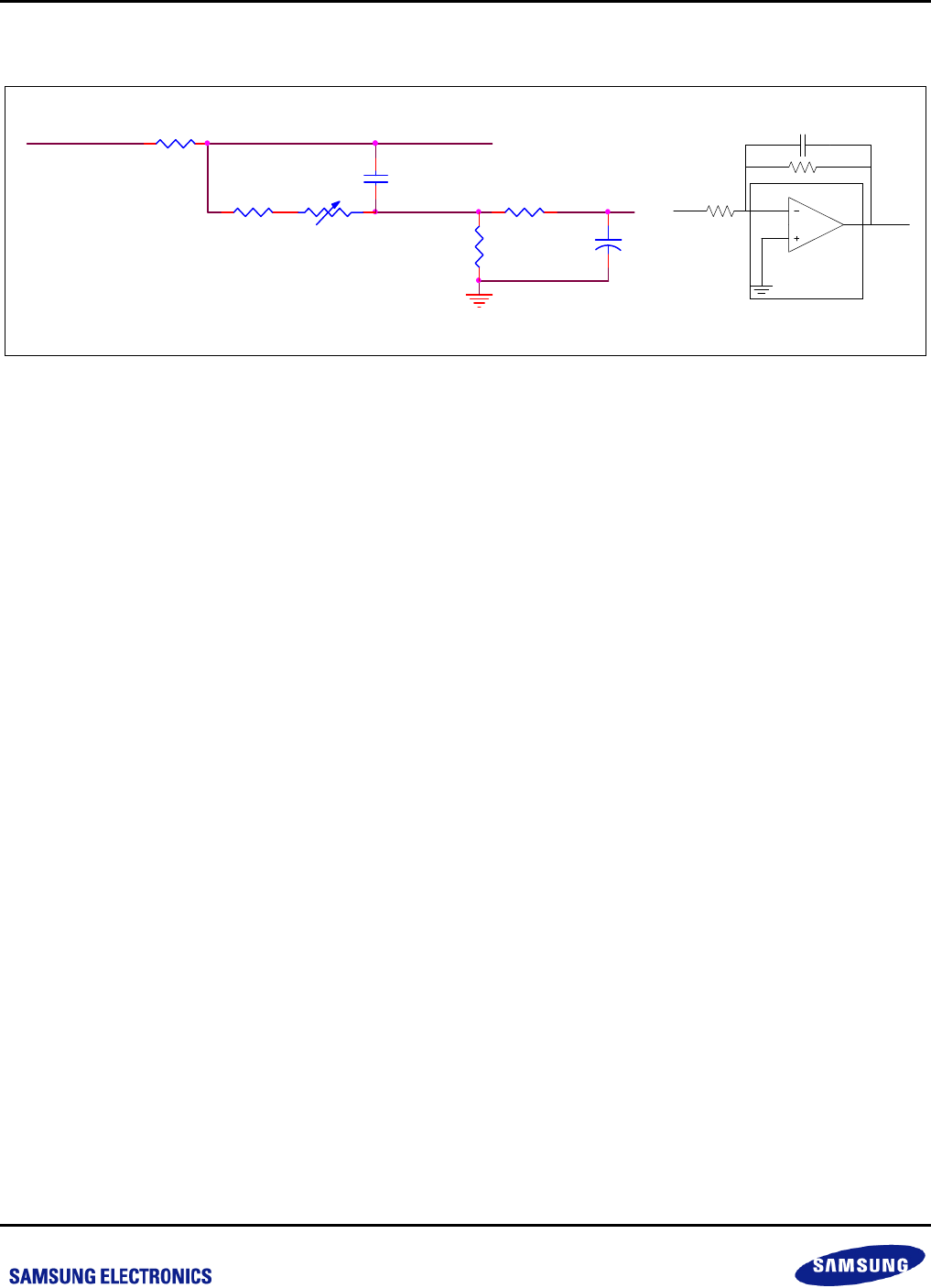
Figure 2-6 Current Measurement Circuit
In the IH cooker system, the current can go as high as 10A. To avoid excessive energy loss, a constantan is used
to change the current signal to voltage signal, which is then amplified by the integrated OPA. Finally, the amplified
signal enters the ADC module. Note that the signal (OPA_N) reaching OPA is negative as compared to MCU
GND. Therefore, OPA has to work as an inverting amplifier with negative gain.
Either the OPA offset or the resistance deviation can lead to inconsistency of output power among different chips.
To get precise power control, two calibrating methods are used. In hardware, a variable resistor (RW1) is chosen,
whereas in software algorithm, the overall offset is measured and calculated before the system starts working. It
likes the quiescent bias that should be removed during normal operation. This way the output power can be
controlled within 10W deviation.