4
PARAMETERS
139
Position control by vector control
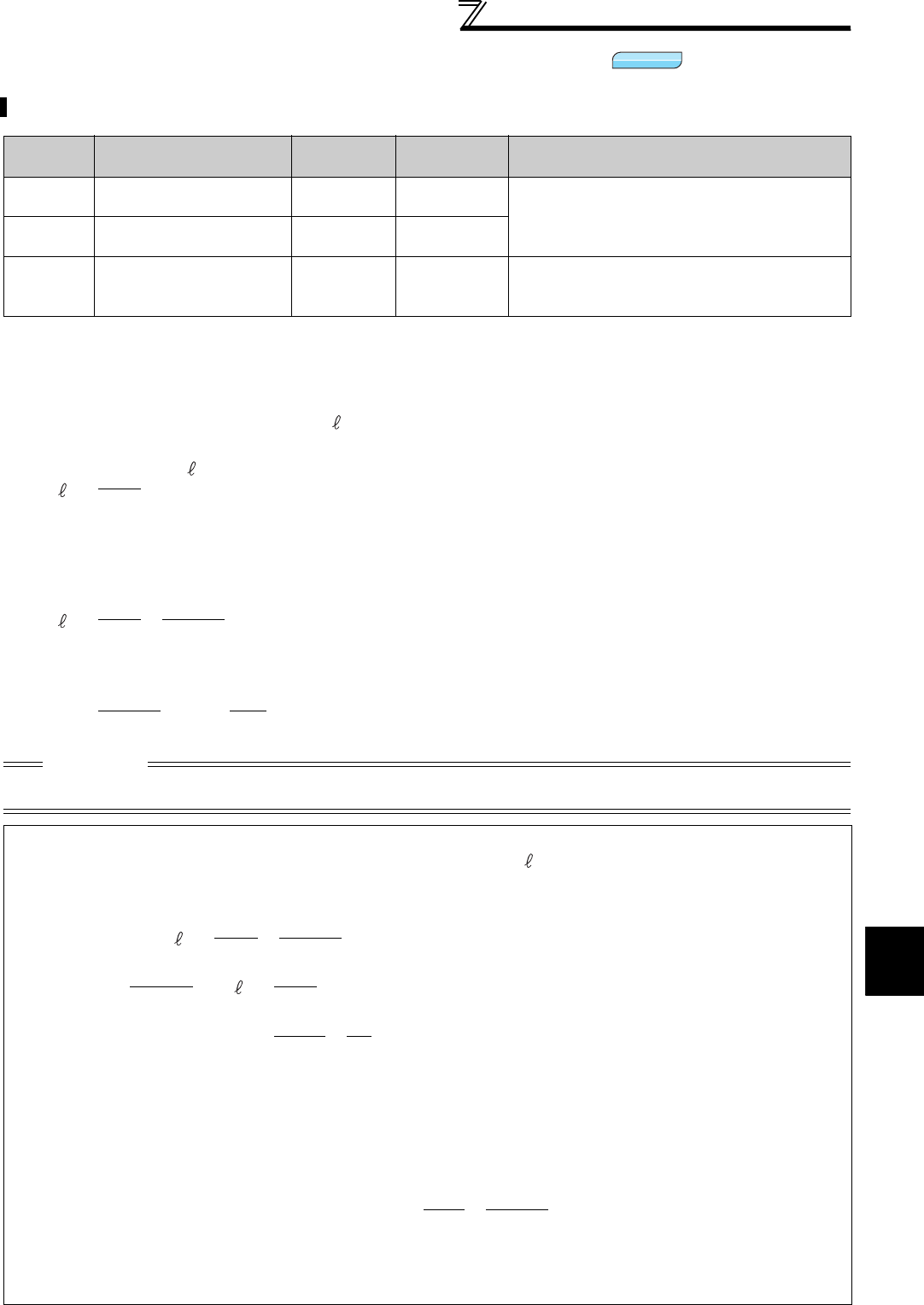
4.6.4 Setting of the electronic gear (Pr. 420, Pr. 421, Pr. 424)
(1) Calculation of the gear ratio (Pr. 420, Pr. 421)
⋅ The position resolution (travel per pulse Δ [mm]) is determined by the travel per motor revolution Δs [mm] and the
feedback pulses Pf [pulse/rev] of the detector, and is represented by the following expression.
Using the parameters, the travel per command pulse can be set separately to set the travel per command pulse
without a fraction.
In addition, the relationship between the motor speed and internal command pulse frequency is as follows:
Set the ratio of the machine side gear and the motor side gear.
Parameter
Number
Name Initial Value
Setting
Range
Description
420
Command pulse scaling
factor numerator
1 0 to 32767 *
Set the electric gear.
Pr. 420 is a numerator and Pr. 421 is a denominator.
421
Command pulse scaling
factor denominator
1 0 to 32767 *
424
Position command
acceleration/deceleration
time constant
0s 0 to 50s
Used when rotation has become unsmooth at a
large electronic gear ratio (about 10 times or more)
and low speed.
The above parameters can be set when the FR-A7AP/FR-A7AL (option) is mounted.
* When the operation panel (FR-DU07) is used, the maximum setting is 9999. When a parameter unit is used, up to the maximum value within
the setting range can be set.
Δ :travel per pulse [mm]
Δs: travel per motor rotation [mm]
Pf: number of feedback pulses [pulse/rev] (number of pulses after multiplying the number of
encoder pulses by four)
Δ
=
Δs
Pf
Δ
=
Δs
×
Pr. 420
Pf Pr. 421
fo ×
Pr. 420
=Pf×
No fo :
Internal command pulse frequency [pps]
Motor speed [r/min]
Pr. 421 60 No :
CAUTION
Set the electronic gear in the range of 1/50 to 20.
Note that too small a value will decrease the speed command and too large a value will increase the speed ripples.
[Setting example 1]
The electronic gear ratio is Δs = 10 (mm) when the travel per pulse Δ = 0.01 (mm) and the number of feedback
pulses Pf = 4000 (pulse/rev) in a drive system where the ballscrew pitch PB = 10 (mm) and the reduction ratio 1/n = 1.
According to the following expression,
Therefore, set "4" in Pr. 420 and "1" in Pr. 421 .
[Setting example 2]
Find the internal command pulse frequency of the dedicated motor rated speed.
Note that the command pulse scaling factor Pr. 420/Pr. 421 = 1.
Assuming that the number of encoder pulses is 2048 (pulses/rev) (feedback pulse Pf = 2048 × 4),
Therefore, the internal command pulse frequency is 204800 (pps).
Vector
Vector
Δ
=
Δs
×
Pr. 420
Pf Pr. 421
Pr. 420
=
Δ
×
Pf
Pr. 421 Δs
=0.01×
4000
=
4
10 1
fo = 2048 ×
4
(multiplication)
×
No
×
Pr. 421
60 Pr. 420
= 204800












































































































































































































































































































































































































































































































































