



















46 UV-SVP01A-EN
Unit Operation
OFF due to a safety or command.
The controller enters the FREEZE
AVOIDANCE mode when an out-
door air temperature is present
(communicated or hardwired) and
it is below the freeze avoidance set-
point (configurable). The controller
disables freeze avoidance when
the outdoor air temperature rises
3°F above the freeze avoidance
setpoint.
When the controller is in the freeze
avoidance mode:
q All water valves are driven
open to allow water flow
through the coil
q Fan is OFF
q Face-and-bypass damper
(when present) is in full BYPASS
q DX and electric heat are OFF
MORNING WARM-UP
The Tracer ZN.520 controller keeps
the modulating outdoor air damp-
er closed anytime during the OCCU-
PIED mode when the space
temperature is 3°F or more below
the heating setpoint.
The damper remains closed indefi-
nitely during morning warm-up
until the space temperature is with-
in 2°F of the effective heating set-
point. The unit runs at full capacity
until setpoint is met.
COOL-DOWN
The Tracer ZN.520 controller keeps
the modulating outdoor air damp-
er closed for up to one hour at ev-
ery transition from UNOCCUPIED to
OCCUPIED mode when the space
temperature is 3°F or more above
the cooling setpoint.
The damper remains closed during
cool-down until the space temper-
ature is within 2°F of the effective
cooling setpoint. The unit runs at
full capacity until setpoint is met.
Data Sharing—LonWorks
Tracer ZN.520 allows peer-to-peer
data communication through the
use of LonWork’s technology. Data
such as space temperature set-
point, occupancy, etc. can be
shared from a master controller to
a peer controller over a twisted pair
of communication wire with or
without the presence of a front end
building management system.
(See Figure 23: “Simple data shar-
ing application”) This ability al-
lows units to operate with the
same data to prevent conflicting
control.
Data sharing is established
through the use of “bindings”.
Bindings are set up through the
Rover service tool.
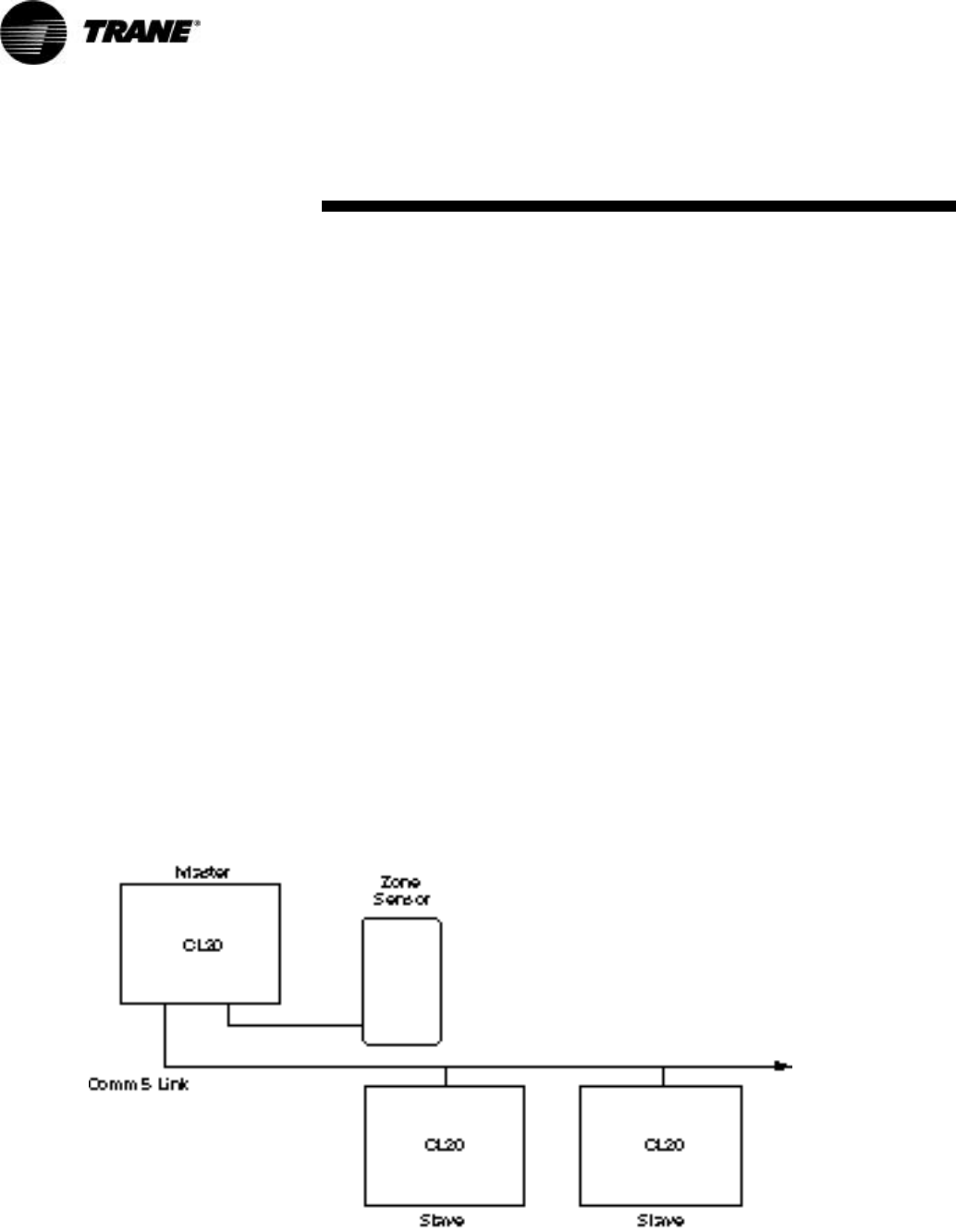
The Tracer ZN.520 controller in-
cludes a network variable for mas-
ter/slave operation. This variable
includes all of the information re-
quired for the slave units to oper-
ate with master controller. (See
Figure 24: “More complex data
sharing application”)
For more information on establish-
ing bindings, see the Rover service
tool manual. For a complete listing
on shared points see “Appendix—
Data Lists” on page64.
Figure 23: Simple data sharing application