



















Installing Cable Assemblies
310554V 19
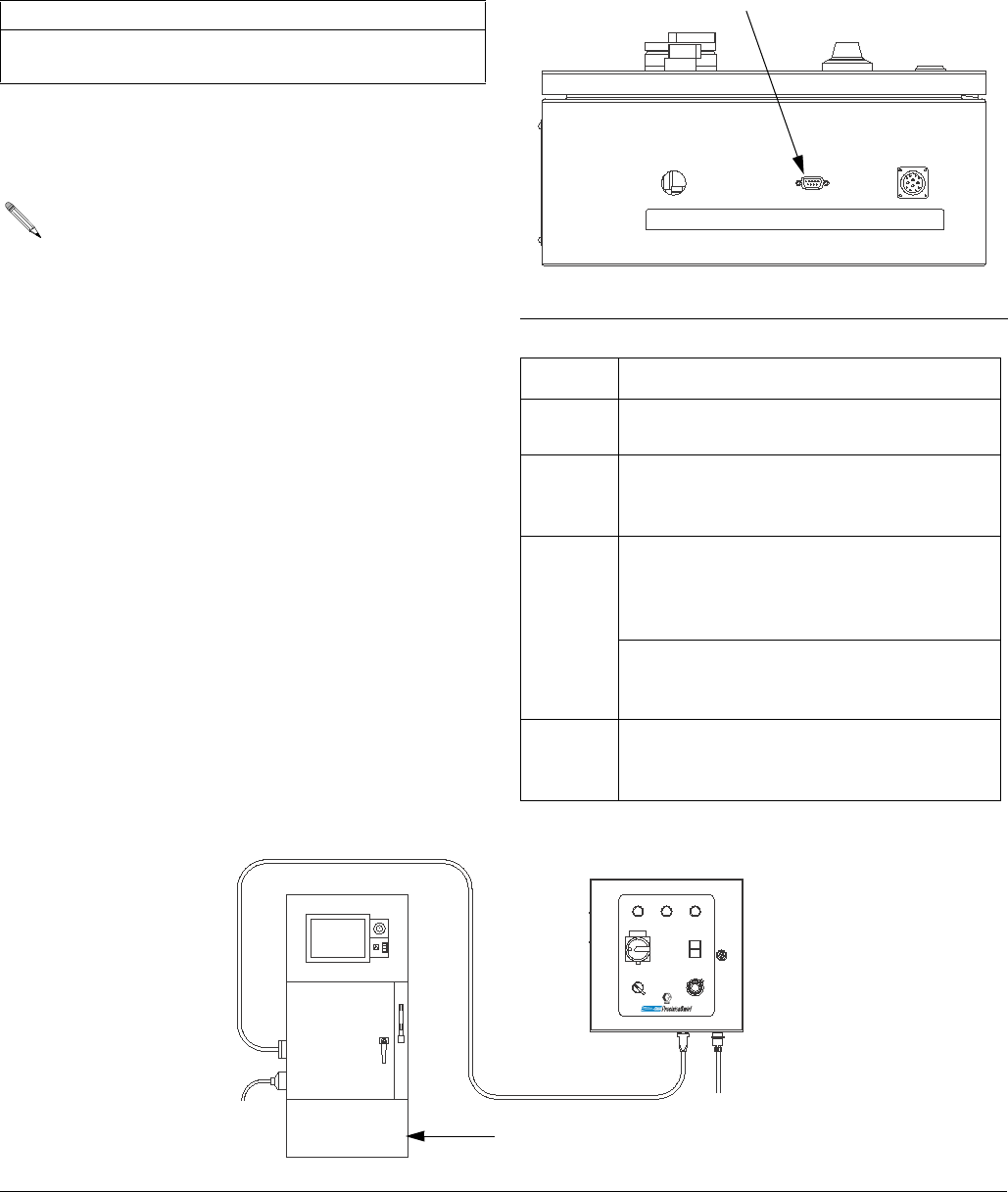
Connecting the Automatic
Control Cable
The PrecisionSwirl control assembly is provided with a
9–pin receptacle for the robot interface cable.
To connect the automatic control cable (P/N 617829)
between the control assembly and the robot, perform
the following steps:
1. Locate the receptacle on the bottom of the control
assembly that is labeled AUTOMATIC CONTROL
CABLE. See F
IG. 10.
2. Connect the cable assembly to the AUTOMATIC
CONTROL CABLE receptacle in F
IG. 10.
3. Secure the cable by tightening the two mounting
screws.
4. Connect the opposite end of the cable assembly to
the applicable terminals or receptacle on the robot
controller.
For information about specific control assembly circuitry
and connections, read the chart below and see the Wir-
ing Diagrams on pages 56 and 57, and F
IG. 11.
5. Check the connections to ensure the cable is con-
nected correctly.
CAUTION
Always make connections to the control assembly
with power turned off.
Any wiring from an external source, such as a robot
controller, must follow the robot manufacturer’s
instructions and must comply with the appropriate
codes and standards.
FIG. 10
Signal Description
Enable The 24V enable signal starts the orbital dis-
penser motor.
Swirl
Speed
Command
This 0-10 VDC analog signal is used to
adjust the motor speed. (0-10 VDC =
6600-24,000 RPM)
Motor
Fault
Alarm
The alarm relay activates when the motor
speed drops below 1500 RPM or does not
start. The relay contacts are normally
closed.
A fault will be generated if any of the front
panel controls are in the wrong position for
automatic operation
Swirl
Speed
Readout
This analog signal can be used to monitor
motor speed.
(0-10 VDC = 0-24,000 RPM)
0/7%2
3500,9
!54/-!4)##/.42/,
#!",%
-/4/2
#!",%
ti0827A
Automatic control cable receptacle
F
IG. 11
0/7%2
-/4/2&!5,4
25.
-!).
25.%.!",%
#/.42/,3%,%#4
!54/-!4)#
-!.5!,
-!.5!,30%%$#/.42/,
8029A
Robot controller