



















4 - 8 PANELWARE MMI Application Manual for GE Fanuc Genius Protocol - June 1995 GFK-1115
4
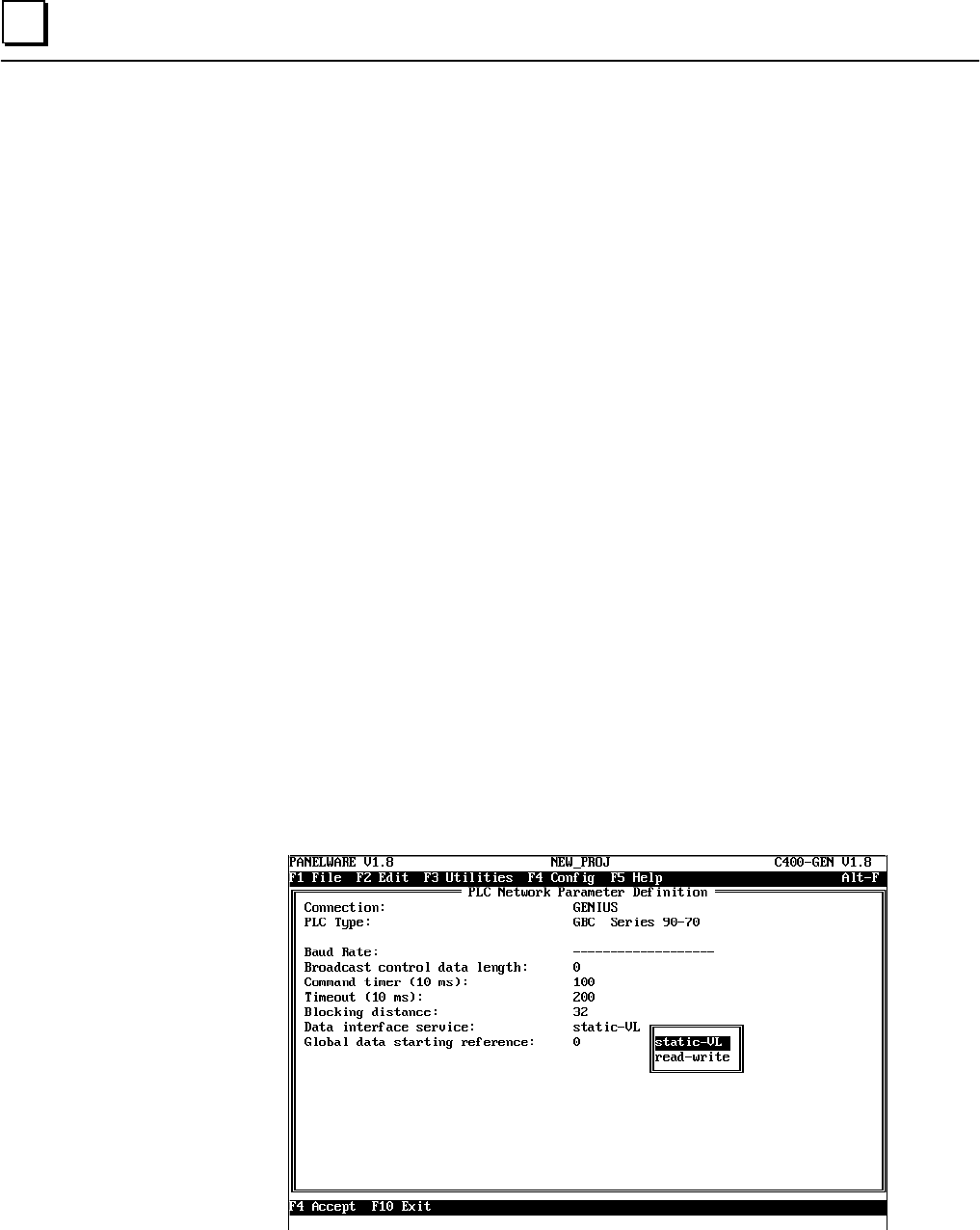
❏ Command timer (10 ms)
Specifies the time, in increments of 10 ms, allotted for the C400 Controller to execute
each command on the Genius bus. The default is 1 second (100 x 10 ms). Note that this
timer controls only the execution of the command; it does not govern the response of the
target device. If needed, this timer can be adjusted within the range of 50 — 500 ms,
inclusive.
❏ Timeout (10 ms)
Specifies the time, in increments of 10 ms, allotted for a target device to respond to a
request from the C400 Controller. The default time is 2 seconds (200 x 10 ms). If needed,
this timer can be adjusted within the range of 50 — 500 ms, inclusive.
❏ Blocking distance
This parameter controls the maximum byte length of datagrams used in requesting data
from a GBC. Increasing this value can decrease the number of datagrams that must be
sent, but at the expense of a longer bus scan. If needed, this value can be adjusted within
the range of 16 — 128, inclusive (default is 32).
❏ Data interface service
Variables can either be accessed individually from the PLC or as a group via a static
variable list. For example, specifying static-VL for the data interface service allows you
to retrieve %R1, %R6, and %R8 in a single datagram request, whereas the read-write
service requires three (albeit shorter) requests. You will almost always want to specify the
static-VL service, because it yields faster data response times. The one exception to this
would be an application that contains a high proportion of key commands in relationship
to the amount of data displayed on any one picture or the amount of data gathered for
generating alarms. Because key commands are processed only between requests,
shortening the processing time of all requests can yield faster key response. If your key
commands appear to execute too slowly, you can try setting the data interface service to
read-write and compare the performance.