



















31
(5) Pr. 362 "position loop gain"
When Pr. 358 "servo torque selection" value has been set to choose the servo torque function, the output
frequency provided to generate servo torque rises gradually up to the creep speed set in Pr. 352 according to the
inclination set in Pr. 362 "position loop gain". Increasing the setting will increase the operation speed but may
cause the machine to hunt.
(6) Monitoring functions
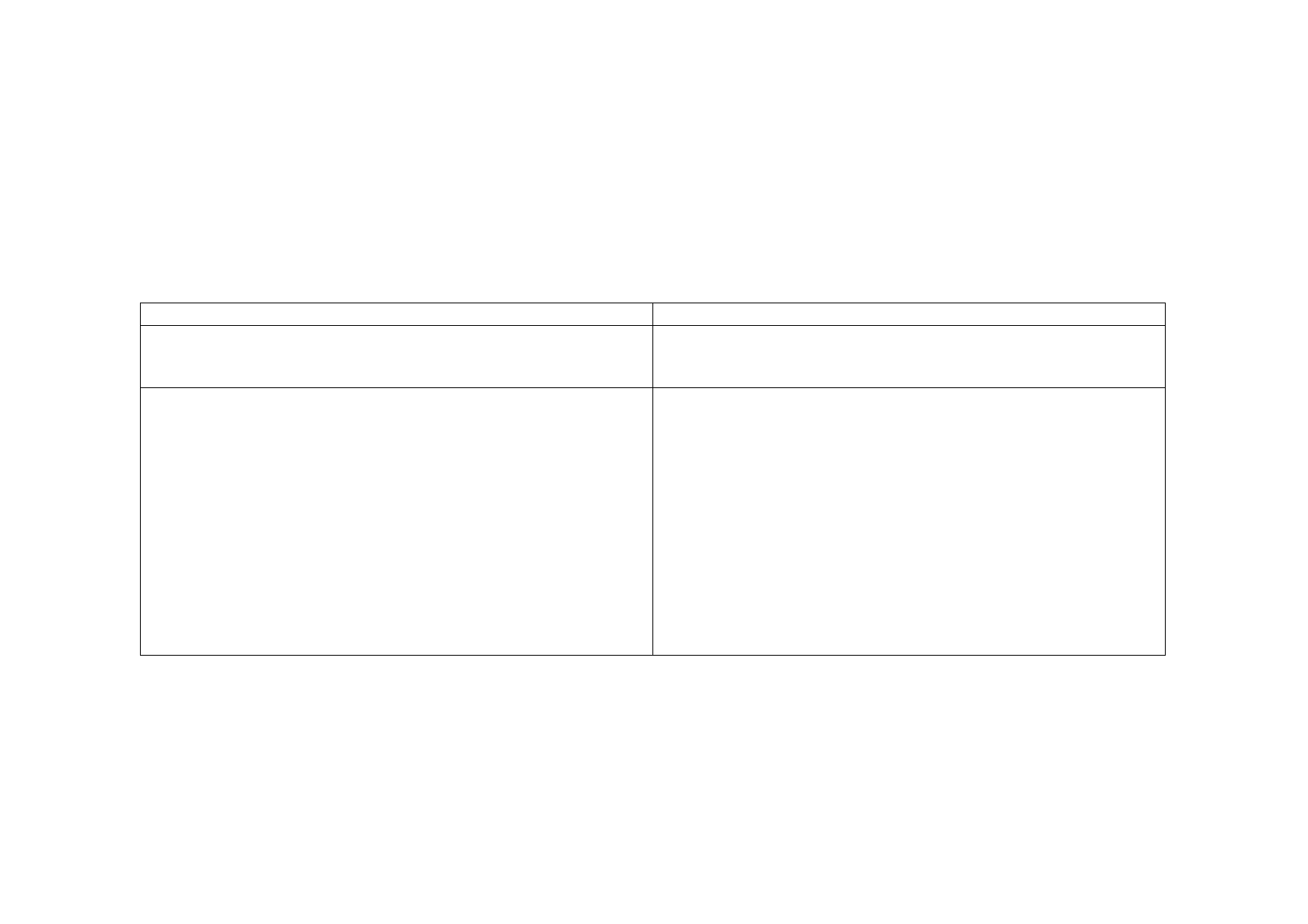
Monitoring Description
Position signal monitoring Set "19" in Pr. 52 to display the position signal on the PU
instead of the voltage (Displayed only when the FR-A5AP is
fitted.)
Orientation status
Set "22" in Pr. 52 to display the orientation status on the PU
instead of the output voltage. (Displayed only when the FR-
A5AP is fitted.)
0 - Orientation not selected (i.e. orientation mode has not
been activated) or orientation speed has not been reached.
1 - Orientation speed reached.
2 - Creep speed reached.
3 - Position loop reached.
4 - In-position.
5 - Orientation fault (pulse stop).
6 - Orientation fault (orientation time limit elapsed).
7 - Orientation fault (recheck).
8 - Positioning orientation in progress.
Servo torque will return the motor to the stop position (if enough torque can be provided) if it is moved from the
stop position. Servo torque is available in all modes vector, V/f, etc. When orientation control is selected.