



















Introduction to PID Control Appendix D: PID Control • D-3
Saturation
Once the input value has wandered outside Propor-
tional Mode’s throttling range, the output percentage will
be at 0% (if below the Throttling Range) or at 100% (if
above the Throttling Range). At this point, PID is consid-
ered to be in saturation, meaning it is operating at full (or
zero) capacity and is not able to react any further to
changes that occur beyond the throttling range.
Proportional Mode cannot distinguish between a satu-
rated and an unsaturated system; it simply makes propor-
tional adjustments to the output percentage. Therefore,
once an input value in a saturated system changes direc-
tion, Proportional Mode reacts to correct the movement,
regardless of how much error exists. As the temperature
changes direction and again moves in the direction of the
setpoint, Proportional Mode will reduce the 100% output
percentage in an attempt to stop the movement and stabi-
lize the temperature.
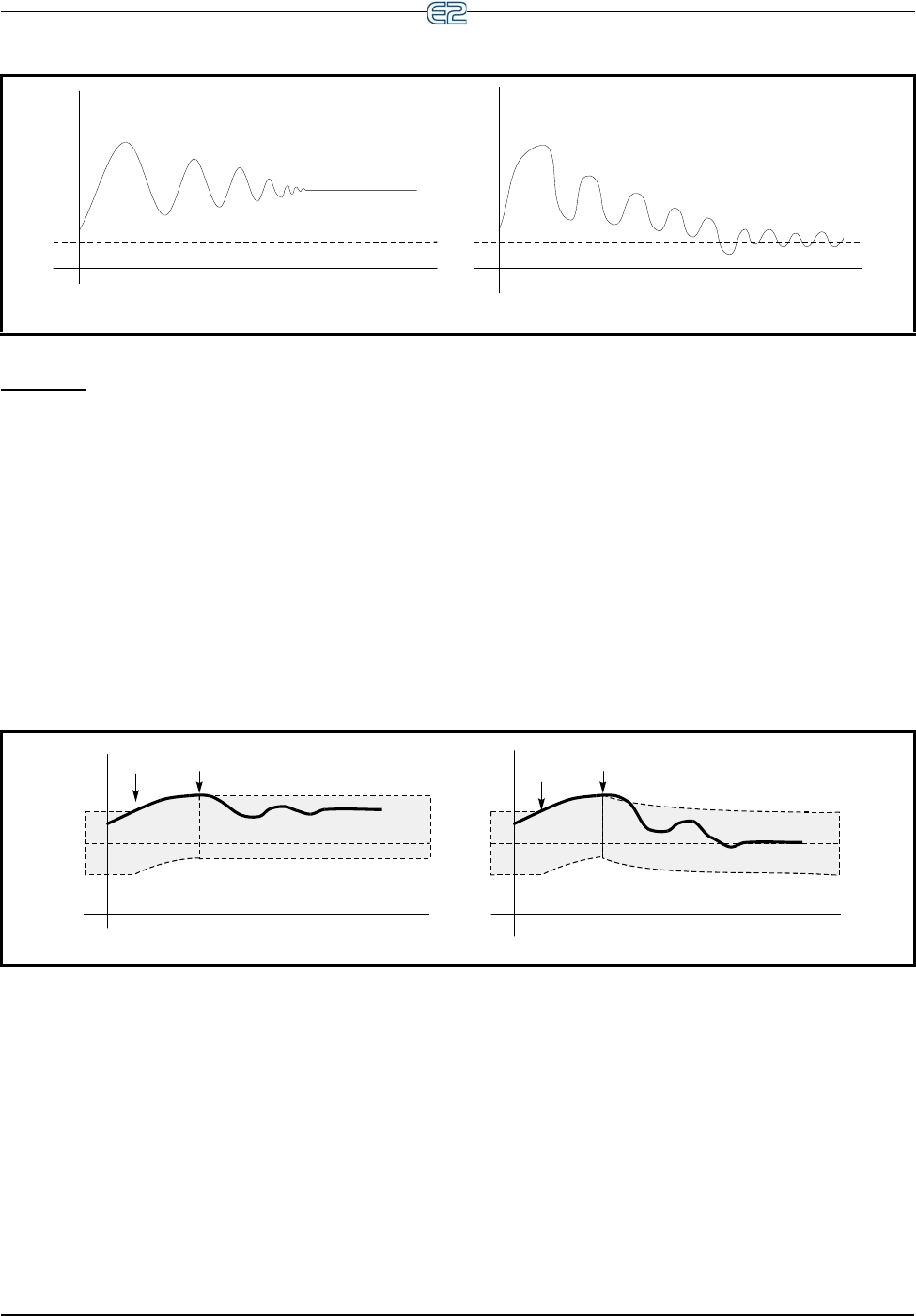
To put it another way, when a system is saturated, the
input changes the placement of the Throttling Range. As
shown in Figure D-2, as the input rises above the Throt-
tling Range, the top end of the Throttling Range rises with
it. When the input finally changes direction, the Throttling
Range remains at its new position.
The “I” Mode covers for Proportional Mode’s inability
to account for saturation. When the input value is outside
the throttling range, “I” Mode will continue to adjust the
output percentage to bring the input value towards the set-
point
The “I” Mode Calculation
To determine the “I” Mode adjustment for each update,
the following calculation occurs:
“I” mode adjustment = K
i
* (current error)
K
i
in this equation is called the integral constant. It is
simply a multiplier that increases or decreases the speed at
which the “I” Mode will increase or decrease the percent-
age.
When changing the value of K
i,
it should be noted that
small adjustments yield large results. For this reason, it is
suggested that K
i
should remain close to 1.0 and certainly
no less than 0.5 and no greater than 2.0.
Derivative Mode
The Proportional and Integral Modes provide a good
method of controlling a closed-loop system. However, in
special circumstances where the input value is changing
rapidly, there may be a lag time between when the error is
noted and the length of time it takes the system to compen-
Figure D-2
- Comparison of “P” Mode vs. “P” + “I” Mode
TEMPERATURE
TEMPERATURE
TIME
TIME
“P” MODE ONLY
“P” + “I” MODES
S E T P O I N T
S E T P O I N T
.
Figure D-3 - Saturation in “P” vs. “P” + “I” Modes
TIME
TIME
“P” MODE ONLY
“P” + “I” MODES
S E T P O I N T
S E T P O I N T
THROTTLING
RANGE
THROTTLING
RANGE
0% 0%
100% 100%
SATURATION
SATURATION
AS INPUT IN SATURATED SYSTEM
CHANGES DIRECTION, THROTTLE RANGE REMAINS
CHANGES DIRECTION, THROTTLE RANGE REMAINS
“I” CORRECTS ERROR AND BRINGS
THROTTLING RANGE BACK TO NORMAL
THROTTLING RANGE
FOLLOWS INPUT DURING
SATURATION
THROTTLING RANGE
FOLLOWS INPUT DURING
SATURATION