



















FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Positioning Control Edition
Built-in Positioning Functions
6 Mechanical Zero Return (DSZR/ZRN Instruction)
6.2 DOG Search Zero Return (DSZR Instruction)
B - 92
6.2.3 Function and Operation
→ For details on the maximum speed, bias speed, acceleration time, and deceleration time, refer to
Subsection 4.2.5 to Subsection 4.2.8.
1) For , specify the near-point signal (DOG) input device number. To specify the logic of this near-
point signal (DOG), turn the "DOG signal logic reverse" relay on or off as shown in the following table.
• When an input (X000 to X017)
*1
from the main unit is used for the near-point signal (DOG)
, the rear end of the near-point signal (DOG) will be monitored (detected) at 1-ms intervals
(interruption).
Under the following condition, however, monitoring (detection) of the near-point signal (DOG) rear end
will be affected by the input constant or the scan time of the sequence program:
- An input number of X020 or below (or other device (auxiliary relay, etc.)) is specified.
*1. Specify X000 to X007 for FX3U-16M, FX3UC-16M.
Specify X000 to X007 for FX3G PLC (main unit).
Pulse output
destination device
"DOG signal logic
reverse" relay
Description
= Y000
M8345
OFF: Positive logic (Turning on the input will turn on the
near-point signal.)
ON: Negative logic (Turning off the input will turn on the
near-point signal.)
= Y001
M8355
= Y002
M8365
= Y003
M8375
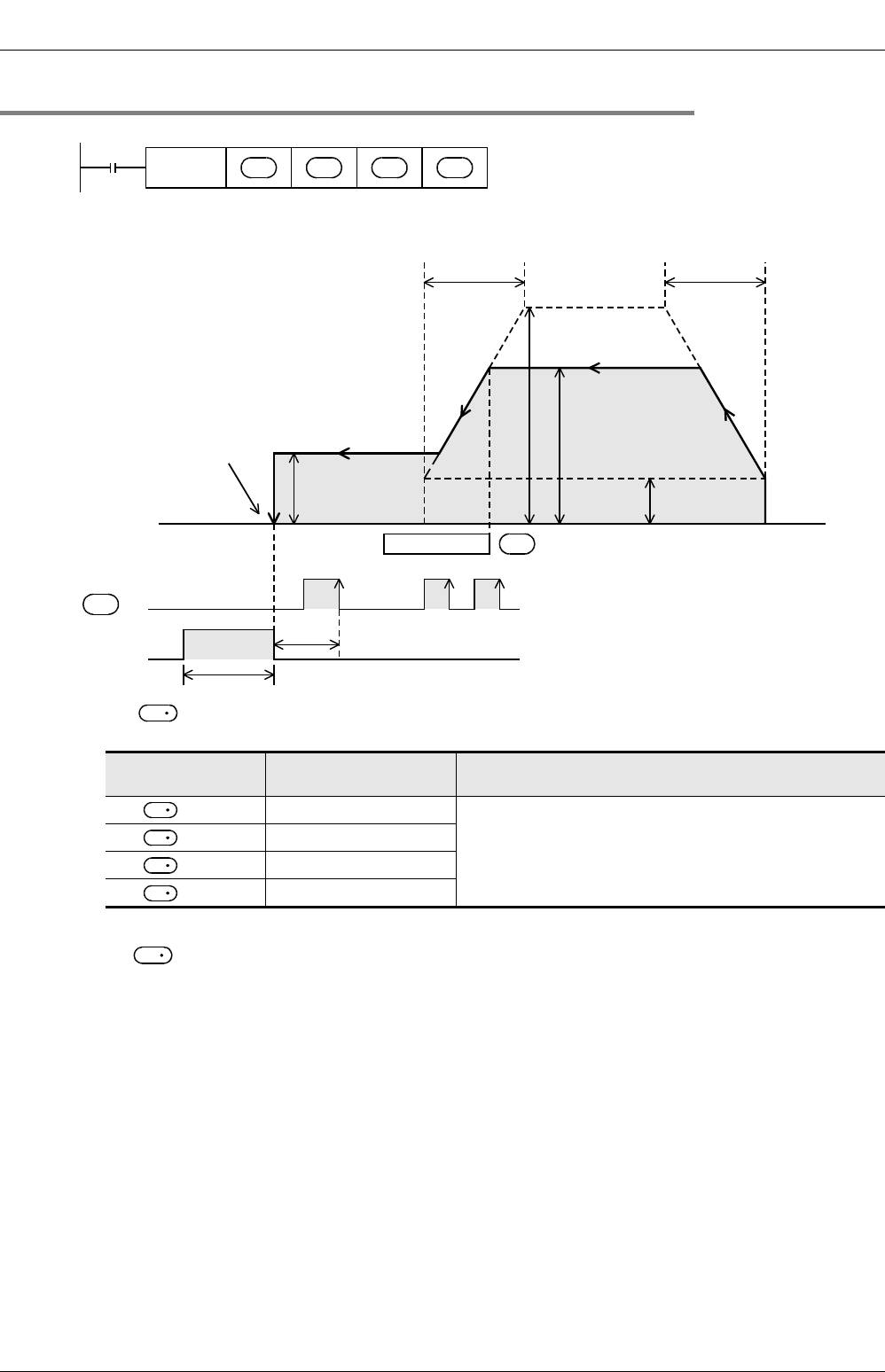
Command
input
FNC 150
DSZR
S
2
•
S
1
•
D
1
•
D
2
•
Maximum speed
Initial value: 100,000Hz
Zero return speed
Initial value: 50,000Hz
Deceleration
time
Bias speed
Initial value: 0Hz
Acceleration
time
Creep speed
Initial value:
1,000Hz
CLEAR signal
Zero-phase signal
(X000 - X007)
1 ms or less
20 ms + 1 scan time (ms)
S
2
•
Current value register = "0"
Initial value:
100 ms
Initial value:
100ms
DOG
S
1
•
Front endRear end
S
1
D
1
D
1
D
1
D
1
S
1