



















FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Positioning Control Edition
Built-in Positioning Functions
4 Before Programming
4.2 Setting of Various Items Regarding Speeds
B - 42
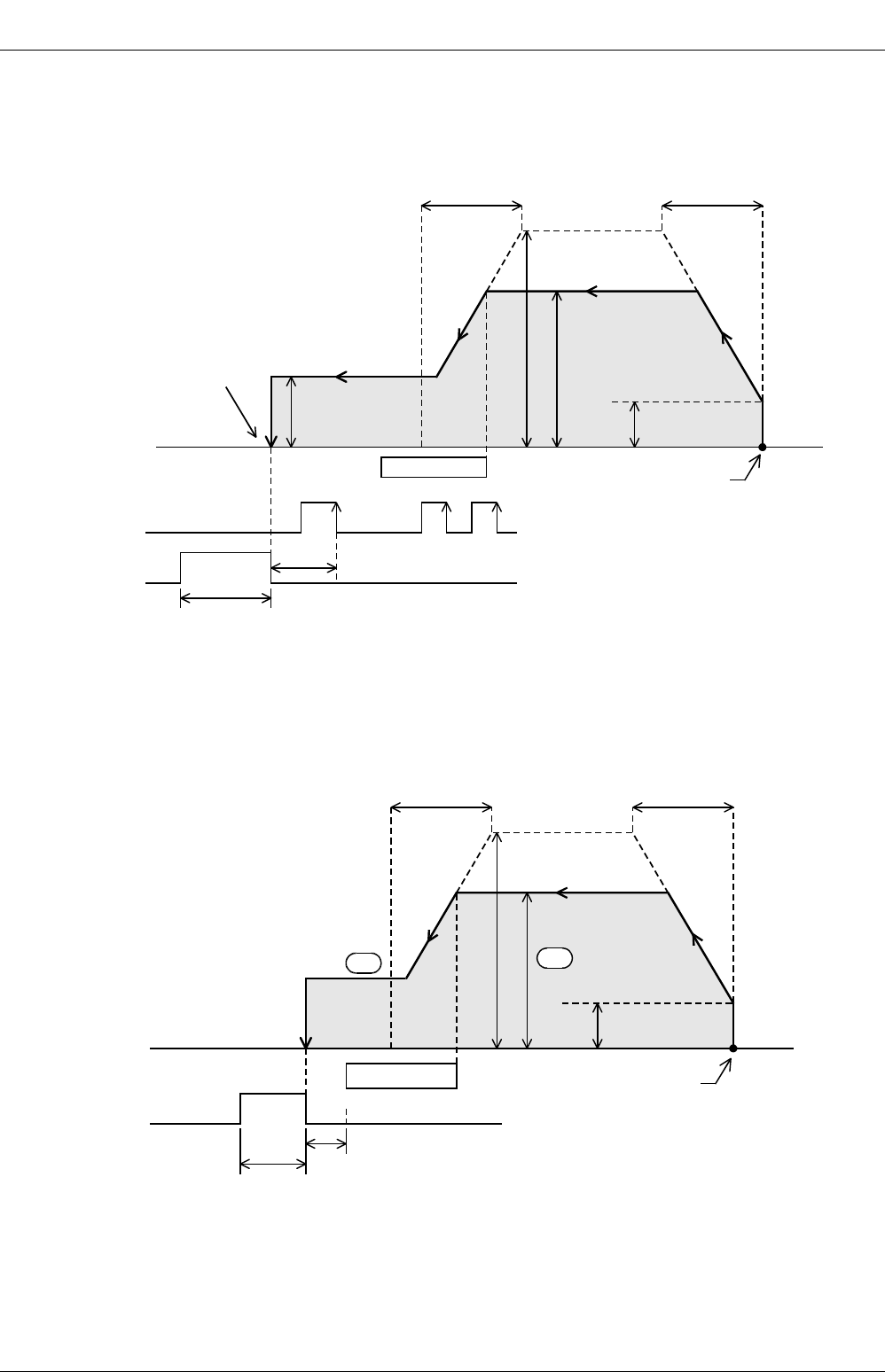
3. Zero return instruction with DOG search function (DSZR)
For this instruction, it is necessary to specify the maximum speed, bias speed, acceleration time, deceleration
time, zero return speed, and creep speed using the related devices.
→ For operation of DSZR instruction, refer to Section 6.2.
→ For details on each setting item, refer to Subsection 4.2.3 to Subsection 4.2.8.
4. Zero return (ZRN) instruction
For this instruction, it is necessary to specify the maximum speed, bias speed, acceleration time, and
deceleration time using the related devices in addition to the zero return speed and the creep speed specified
by the operand of the instruction.
→ For operation of ZRN instruction, refer to Section 6.1.
→ For details on each setting item, refer to Subsection 4.2.5 to Subsection 4.2.8.
Maximum speed
Initial value:
100,000 Hz
Zero return speed
Initial value: 50,000 Hz
Deceleration time
Bias speed
Initial value: 0 Hz
Acceleration time
DOG
Creep speed
Initial value:
1,000 Hz
CLEAR signal
Zero-phase signal
(X000 - X007)
Front endRear end
1 ms or less
20 ms + 1 scan time (ms)
Current value register = "0"
Initial value:
100 ms
Current position
Initial value:
100 ms
20 ms + 1 scan time (ms)
Zero return speed
Deceleration time
Acceleration time
DOG
Creep speed
CLEAR signal
Front endRear end
1 ms or less
S
2
•
S
1
•
Maximum speed
Initial value:
100,000 Hz
Initial value:
100 ms
Bias speed
Initial value: 0 Hz
Current position
Initial value:
100 ms