



















FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Positioning Control Edition
Built-in Positioning Functions
8 1-Speed Positioning - DRVI/DRVA Instruction
8.2 Drive to Increment - DRVI Instruction
B - 116
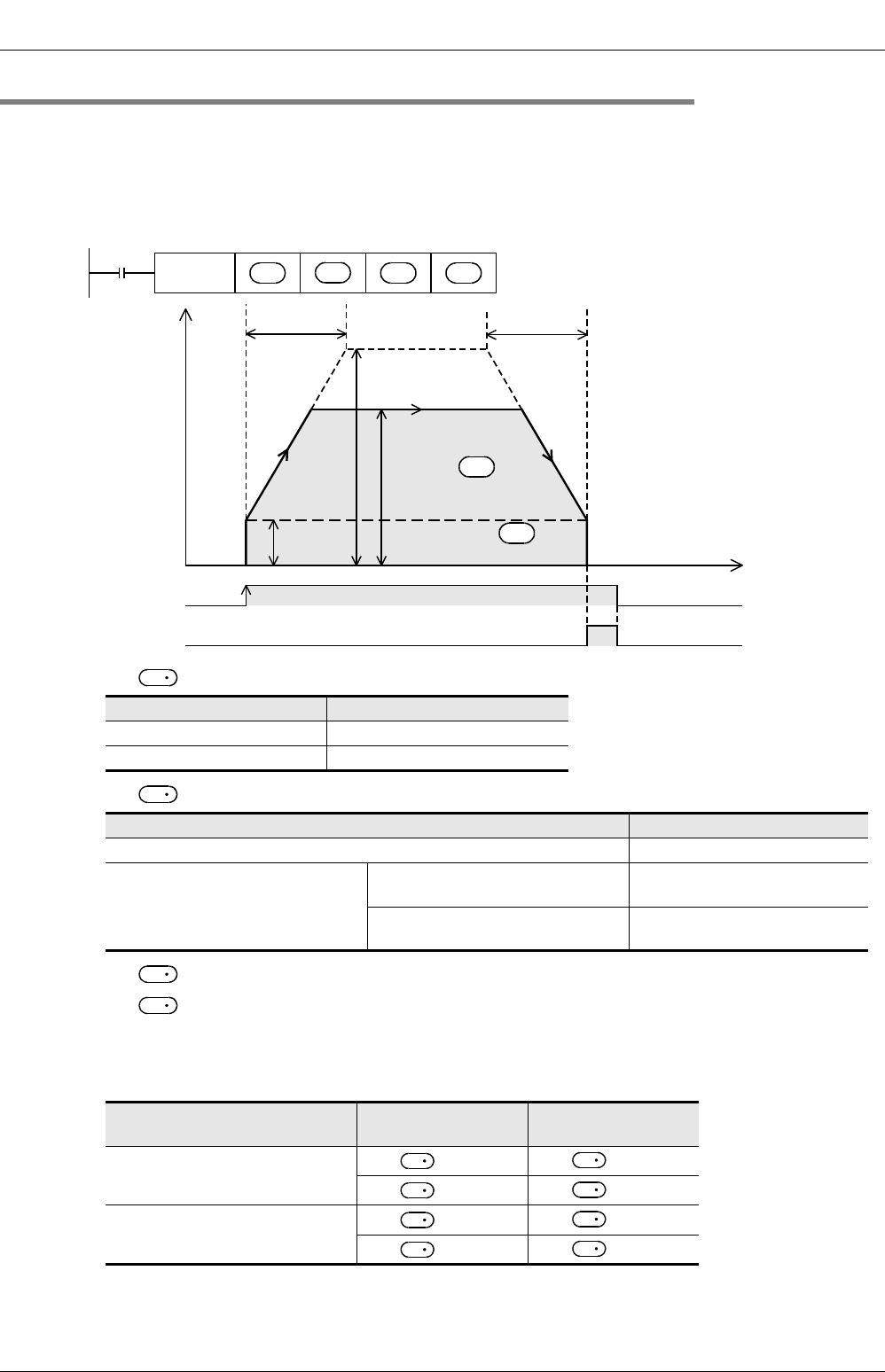
8.2.3 Function and Operation
This instruction uses a relative drive method to perform a 1-speed positioning instruction. For this instruction,
the transfer distance from the current position to the target position should be specified together with a plus or
minus sign. This method is also referred to as the incremental (relative) drive method.
→ For details on the "Instruction execution complete" flag, refer to Subsection 4.7.4.
→ For details on the maximum speed, bias speed, acceleration time, and deceleration time, refer to
Section 4.2.
1) For , specify the number of output pulses (relative address value).
2) For , specify the output pulse frequency.
3) For , specify the pulse output number in the range of Y000 to Y003.
4) For , specify the rotation direction signal output device number.
When a high-speed output special adapter is used as a destination for pulse output on a FX
3U PLC, use
the output shown in the following table for rotation direction signals.
When a built-in transistor output is used as a destination for pulse output on a FX
3G/FX3U/FX3UC PLC,
use transistor output for signals rotation direction.
Setting range
16-bit operation -32,768 to +32,767
32-bit operation -999,999 to +999,999
Setting range
16-bit operation 10 to 32,767(Hz)
32-bit operation
When a high-speed output special
adapter is used
10 to 200,000(Hz)
When a transistor output from the
main unit is used
10 to 100,000(Hz)
High-speed output special
adapter connection position
Pulse output
destination device
Rotation direction
output
1st adapter
= Y000
=
Y004
= Y001
=
Y005
2nd adapter
= Y002
=
Y006
= Y003
=
Y007
Command
input
FNC 158
DRVI
S
1
•
S
2
•
D
1
•
D
2
•
Output pulse
frequency
Time
Speed
Instruction execution
Number of output
pulses
S
1
•
S
2
•
"Instruction
execution complete" flag
M8029
ON
Maximum speed
Deceleration
time
Bias
speed
Acceleration
time
S
1
S
2
D
1
D
2
D
1
D
2
D
1
D
2
D
1
D
2
D
1
D
2