



















FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Positioning Control Edition
Built-in Positioning Functions
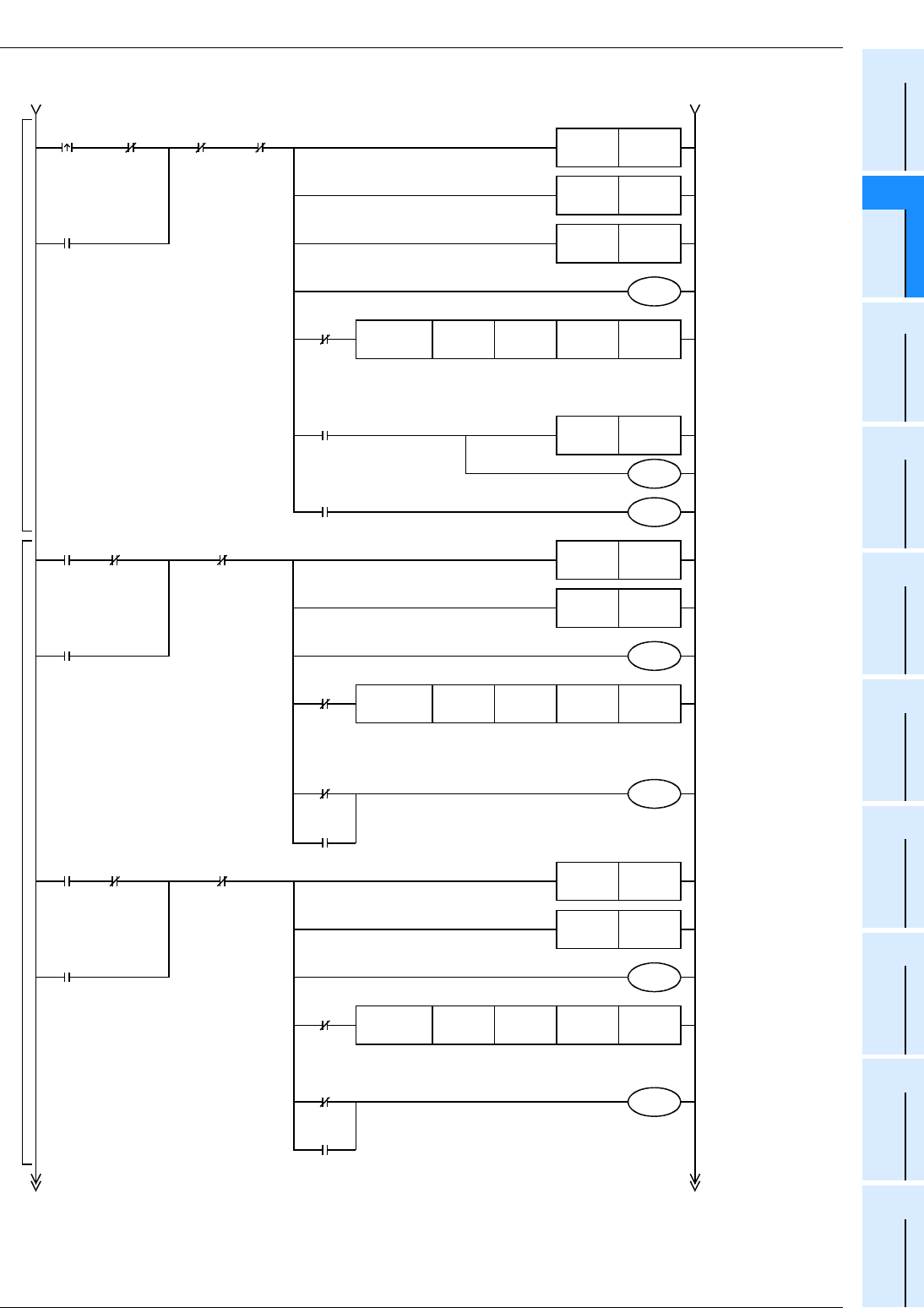
12 Examples of Programs
12.2 Programs for Forward/Reverse Rotation (Relay Ladder Program)
B - 157
A
Common Items
B
Built-in
Positioning
Functions
Apx.
Example
Connection
*1. The maximum transfer distance for each jogging operation is ±999,999 pulses (pulse output range of
FNC158 (DRVI) instruction). To move the workpiece further, execute the JOG command again.
Zero
return
M8348
Positioning
being
performed
(Y000)
M10RST
M12RST
M13RST
X021 M101
Normal
end of
zero
return
M100
Zero return being
performed
M102
Abnormal
end of
zero
return
M100
Y004Y000X004X010
FNC 150
DSZR
M8029
"Execution
completion" flag
M10SET
M101
M102
M8329
Abnormal
end
JOG
(+)
M8348
M12RST
X022 M104
Completes
the JOG(+)
operation.
Positioning
being
performed
(Y000)
M13RST
M103
Y004Y000K30000K999999
FNC 158
DDRVI
Near-point
signal
Zero-
phase
signal
Pulse
output
destination
number
Rotation
direction
signal
Number of
output pulses
(maximum value
in "+" direction)
Output
pulse
frequency
Pulse
output
destination
number
Rotation
direction
signal
M103
JOG(+) operation is
being performed.
X022
JOG(+)
M104
M8329
Abnormal
end
Z
e
r
o
r
e
t
u
r
n
Jogging operation
JOG
(-)
M8348
M12RST
X023 M106
Completes
the JOG(-)
operation.
Positioning
being
performed
(Y000)
M13RST
M105
Y004Y000K30000K-999999
FNC 158
DDRVI
Number of
output pulses
(maximum value
in "-" direction)
Output
pulse
frequency
Pulse
output
destination
number
Rotation
direction
signal
M105
JOG(-) operation is
being performed.
X023
JOG(-)
M106
M8329
Abnormal
end
X030
Stop
command
X030
Stop
command
X030
Stop
command
*1
*1
Resets the "zero
return completion"
flag.
Resets the "forward
rotation positioning
completion" flag.
Resets the "reverse
rotation positioning
completion" flag.
Zero return is being
performed.
Zero return instruction
with DOG search
function
(CLEAR signal: Y020)
Resets the "forward
rotation positioning
completion" flag.
Resets the "reverse
rotation positioning
completion" flag.
JOG(+) operation is
being performed.
Performs the jogging
operation in the "+"
direction using the
drive to Increment
instruction.
(Y004=ON)
"Zero return
completion" flag
Normal end of zero
return
Abnormal end of
zero return
Completes the
JOG(+) operation.
Resets the "forward
rotation positioning
completion" flag.
Resets the "reverse
rotation positioning
completion" flag.
JOG(-) operation is
being performed.
Performs the jogging
operation in the "-"
direction using the
drive to Increment
instruction.
(Y004=OFF)
Completes the
JOG(-) operation.