



















FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Positioning Control Edition
Built-in Positioning Functions
6 Mechanical Zero Return (DSZR/ZRN Instruction)
6.2 DOG Search Zero Return (DSZR Instruction)
B - 96
2. DOG search function
If the forward rotation limit and the reverse rotation limit are set, the DOG search function can be used for
zero return. The zero return operation depends on the zero return start position.
1) If the start position is before the DOG:
a) When the zero return instruction is executed, zero return will be started.
b) Transfer operation will be started in the zero return direction at the zero return speed.
c) If the front end of the DOG is detected, the speed will be reduced to the creep speed.
d) After detecting the rear end of the DOG, if the first zero-phase signal is detected, the operation will be
stopped.
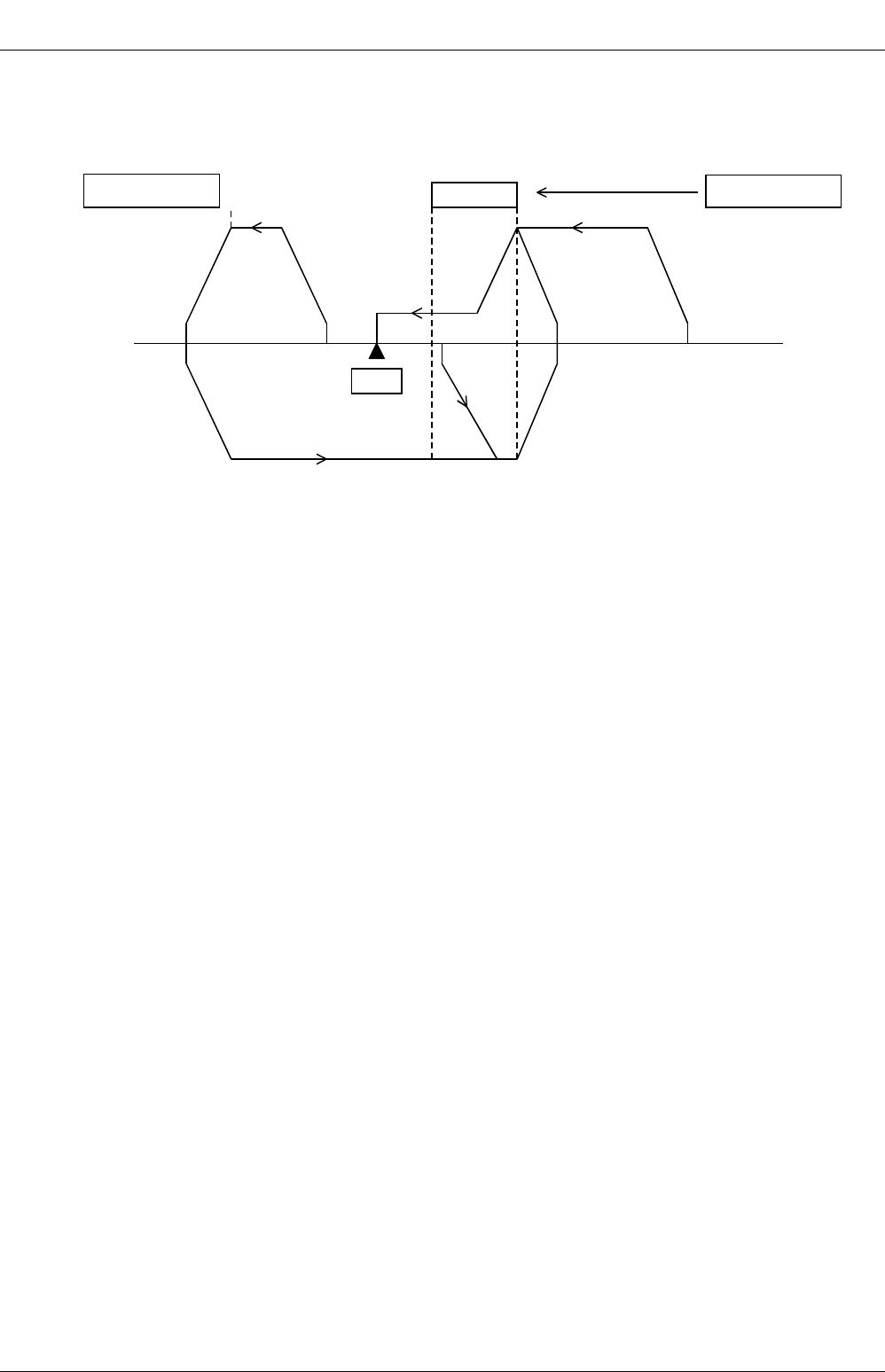
2) If the start position is in the DOG area:
a) When the zero return instruction is executed, zero return will be started.
b) Transfer operation will be started in the opposite direction of the zero return direction at the zero return
speed.
c) If the front end of the DOG is detected, the speed will decelerate and the operation will stop. (The
workpiece will come out of the DOG area.)
d) Transfer operation will be restarted in the zero return direction at the zero return speed (and the
workpiece will enter the DOG area again).
e) If the front end of the DOG is detected, the speed will be reduced to the creep speed.
f) After detecting the rear end of the DOG, if the first zero-phase signal is detected, the operation will be
stopped.
3) If the start position is in the near-point signal OFF area (after the DOG):
a) When the zero return instruction is executed, zero return will be started.
b) Transfer operation will be started in the zero return direction at the zero return speed.
c) If the reverse rotation limit 1 (reverse rotation limit) is detected, the speed will decelerate, and the
operation will stop.
d) Transfer operation will be started in the opposite direction of the zero return direction at the zero return
speed.
e) If the front end of the DOG is detected, the speed will be reduced and the operation will be stopped.
(The workpiece will detect the DOG and then come out of the DOG area.)
f) Transfer operation will be restarted in the zero return direction at the zero return speed. (The
workpiece will enter the DOG area again.)
g) If the front end of the DOG is detected, the speed will be reduced to the creep speed.
h) After detecting the rear end of the DOG, if the first zero-phase signal is detected, the operation will be
stopped.
Zero return
direction
1)2)3)
Operation in
reverse rotation
direction
Operation in
forward rotation
direction
Reverse rotation
limit 1
DOG
Forward rotation
limit 1
Origin
Reverse rotation limit Forward rotation limit
4)
Front endRear end