



















FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Positioning Control Edition
Built-in Positioning Functions
6 Mechanical Zero Return (DSZR/ZRN Instruction)
6.3 Zero Return (ZRN Instruction)
B - 103
A
Common Items
B
Built-in
Positioning
Functions
Apx.
Example
Connection
3) For , specify the near-point signal (DOG) input device number ( NO contact).
Turning on the near-point signal will reduce the speed to the creep speed. Turning off the near-point
signal will complete the zero return operation.
→ For details, refer to "1. Zero return operation".
• If an input (X000 to X007) of the main unit is specified for the input signal, the PLC interruption function
will be used to stop the operation. (To output the CLEAR signal, turn on the "CLEAR signal output
function enable" relay.)
Under the following condition, however, operation may be affected by the input constant or the scan
time of the sequence program, and the operation, therefore, may not be stopped exactly at the origin.
-An input number of X010 or below (or other device (auxiliary relay, etc.)) is specified.
• If an input relay X010 or higher is specified for the near-point signal, the input filter (10 ms) will be
applied.
4) For , specify a pulse output number in the range of Y000 to Y003.
5) Zero return direction
For this instruction, the zero return direction is set to the reverse rotation direction.
(During zero return operation, the value indicated in the current value register will be decreased.)
To perform zero return in the forward rotation direction
*1
, follow the example program below to control the
direction output.
→ For programming details, refer to Section 4.7.
→ To use the main unit (transistor output), refer to Section 4.8.
→ To use a high-speed output special adapter, refer to Section 4.9.
a) Turn on Y (rotational direction signal).
b) Refresh Y output using the REF (FNC50) instruction.
c) Execute the ZRN instruction (zero return instruction).
d) With the execution completion flag (M8029) of the ZRN instruction (zero return instruction), reset
Y (rotational direction signal).
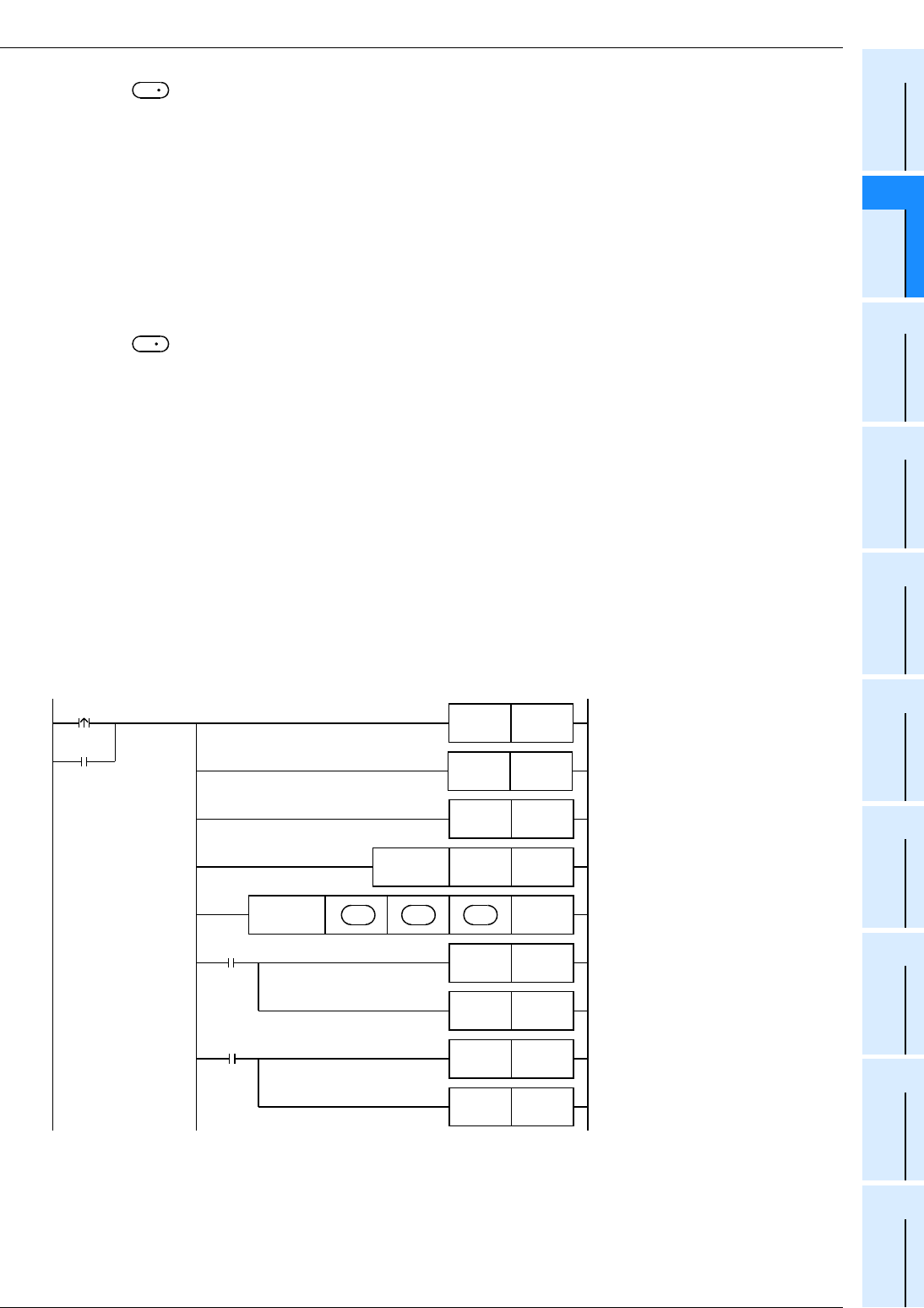
Example program:
In the program shown below, Y004 is specified as the rotation direction signal output device for Y000.
*1. The pulses being output will always decrease the current value.
S
3
D
C
omman
d
input
Turns on (sets) Y004 as the
rotational direction signal of Y000
(pulse output destination).
M8340
Y000 output
pulse monitor
K8Y000
Y000
Y004RST
Refreshes Y000 to Y007.
Executes ZRN instruction.
Resets the rotational direction
signal (Y004) using the instruction
execution complete flag.
Y004SET
FNC 50
REFP
FNC156
DZRN
S
1
•
S
2
•
S
3
•
M8029
M11RST
M10RST
M10SET
Origin data reading completion flag
Resets the rotational direction signal
(Y004) using the instruction
execution abnormal end flag.
Y004RST
M8329
M11SET
Abnormal end of zero return
a)
b)
c)
d)