



















FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Positioning Control Edition
Built-in Positioning Functions
4 Before Programming
4.2 Setting of Various Items Regarding Speeds
B - 41
A
Common Items
B
Built-in
Positioning
Functions
Apx.
Example
Connection
4.2 Setting of Various Items Regarding Speeds
Specify the output pulse frequency using the operand of each instruction or the related device to determine
the output pulse frequency, zero return speed, or creep speed.
4.2.1 Setting of Various Items Regarding Instructions and Speeds
1. Interrupt Positioning (DVIT) instruction, drive to increment (DRVI) instruction, and drive to
absolute (DRVA) instruction
For these instructions, it is necessary to specify the maximum speed, bias speed, acceleration time, and
deceleration time using the related devices in addition to the output pulse frequency specified by the operand
of the instruction.
→ For operation of DVIT instruction, refer to Chapter 9.
→ For operation of DRVI or DRVA instruction, refer to Chapter 8.
→
For details on each setting item, refer to Subsection 4.2.2 , and Subsection 4.2.5 to Subsection 4.2.8
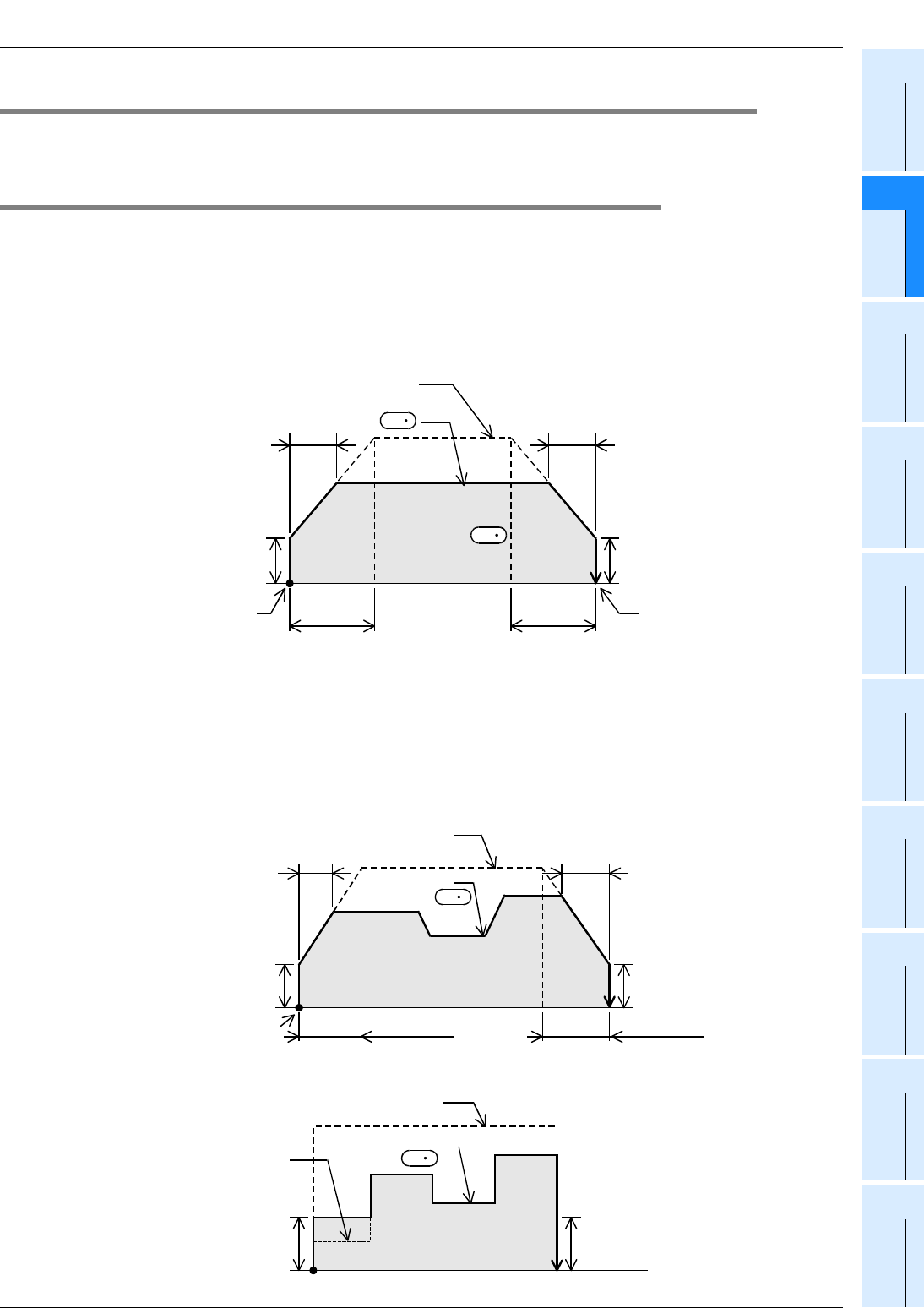
2. Variable speed Pulse Output (PLSV) instruction
For the variable speed pulse output (PLSV) instruction, it is necessary to specify the maximum speed, bias
speed, acceleration time, and deceleration time using the related devices in addition to the output pulse
frequency specified by the operand of the instruction. However, note that the acceleration time and the
deceleration time are only valid during acceleration/deceleration (M8338 = ON).
→ For operation of PLSV instruction, refer to Chapter 10.
→ For details on each setting item, refer to Subsection 4.2.2 , and Subsection 4.2.5 to Subsection
4.2.8.
1) When acceleration/deceleration is being performed (M8338 = ON)
2) When acceleration/deceleration is not performed (M8338 = OFF)
Actual
acceleration time
Bias speed
Acceleration
time
Initial value: 100 ms
Deceleration
time
Number of
output pulses
Maximum speed
Initial value: 100,000 Hz
Actual
deceleration time
Bias speed
Current
position
Target
position
Initial value: 100 ms
Initial value: 0 Hz
S
1
Output pulse frequency
S
2
Bias speed
Acceleration
time
Initial value: 100 ms
Output pulse
frequency
Maximum speed
Initial value: 100,000 Hz
Actual
deceleration time
Bias speed
Initial value: 100 ms
Initial value: 0 Hz
S
Current
position
Deceleration
time
Actual
acceleration time
Bias speed
Output pulse
frequency
Bias speed
Initial value: 0 Hz
S
Maximum speed
Initial value: 100,000 Hz
If the frequency value is
less than the bias speed
value, the frequency will
not be output.