


















FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Positioning Control Edition
Built-in Positioning Functions
2 Specifications
2.6 List of Functions
B - 30
2.6 List of Functions
The instructions needed for the FX
3G
/FX
3U
/FX
3UC
PLC built-in positioning functions are shown in the following
table:
Positioning instruction Operation Description Refer to
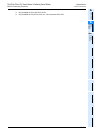
Mechanical zero return
DSZR
instruction
zero return
with DOG
search
function
If the DSZR/ZRN instruction turns ON,
mechanical zero return will be started at
the specified zero return speed. If the dog
sensor is turned on, the speed will be
reduced to the creep speed. If the zero-
phase signal is input, the operation will be
stopped, and the zero return will be
completed.
(If the ZRN instruction is used, the dog
sensor will be turned off to stop the
operation.)
Chapter
6.
ZRN
instruction
zero return
Absolute position detection system
ABS
instruction
Absolute
value detec-
tion system
(Reading of
current ABS
value)
If the ABS instruction turns ON, the
current motor address will be read out
from the servo amplifier.
Chapter
7.
1-speed positioning
DRVI
instruction
Relative
positioning
If the DRVI/DRVA instruction turns ON,
the operation will be started at the
operation speed. When the workpiece
reaches the target position, the operation
will be stopped.
Chapter
8.
DRVA
instruction
Absolute
positioning
1-speed positioning with interruption
DVIT
instruction
*1
Interruption
positioning
If the DVIT instruction turns ON, the
operation will be started at the operation
speed. If the interrupt input turns ON, the
workpiece will go the specified transfer
distance, before decelerating to stop.
Chapter
9.
Variable speed operation
PLSV
instruction
Variable
positioning
(Variable
Speed Pulse
Output)
If the PLSV instruction turns ON,
operation will be started at the specified
speed. With an operation speed change,
the speed changes to the specified speed,
and operation continues.
At PLSV instruction OFF, the pulse output
stops.
With acceleration/deceleration operation,
the PLC accelerates and decelerates.
Chapter
10.
Others
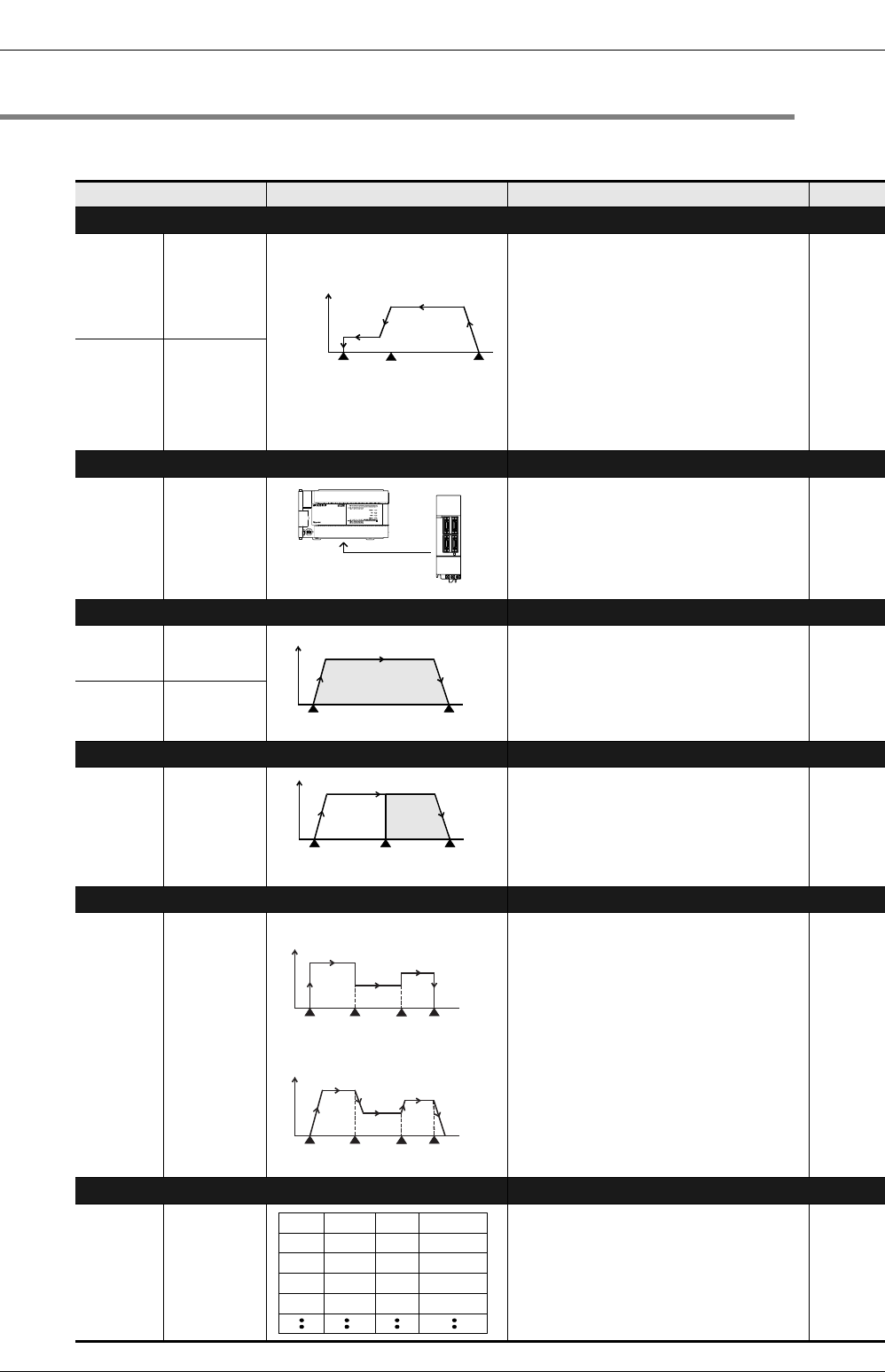
TBL
instruction
*2
Positioning
using batch
setting
method
Preliminarily set the positioning points by
parameters. If the TBL instruction turns
ON, the workpiece will be transferred to
the specified point.
Chapter
11.
Speed
StartDOG:ONZero point: ON
Zero return
speed
Creep
speed
(Dog: OFF when ZRN
instruction is used)
Reads out the
current value.
Speed
Start Target position
Operation speed
Transfer distance
Speed
Start
Interrupt
input: ON
Operation speed
Transfer
distance
Speed
Start Speed
change
Operation speed
Speed
change
Instruction:
OFF
Operation speed
Speed
Start Speed
change
Speed
change
Instruction:
OFF
Operation without
A
cceleration/Deceleration
Operation with
A
cceleration/Deceleration*
2
Position Speed InstructionNo.
1
2
3
4
1000
20000
50
800
2000
5000
1000
10000
DRVI
DVIT
DRVA
DRVA